Job preferences

Utku Olcar
is open to work
Job titles
Robotics Engineer · Robotics Software Engineer · Robotics Specialist · Mechatronics Engineer · Embedded Software Engineer
Start date
Immediately, I’m actively applying
Job types
Full-time (I can work remotely)
If you are hiring, leave an email address, please.
Dacia Duster Roadshow Mixed Reality with VR Headset
Details
- Date : March 28, 2018
- Category : Device Solutions
- Client : Dacia Duster
- Organization : Hisseli Harikalar
Flow Chart :
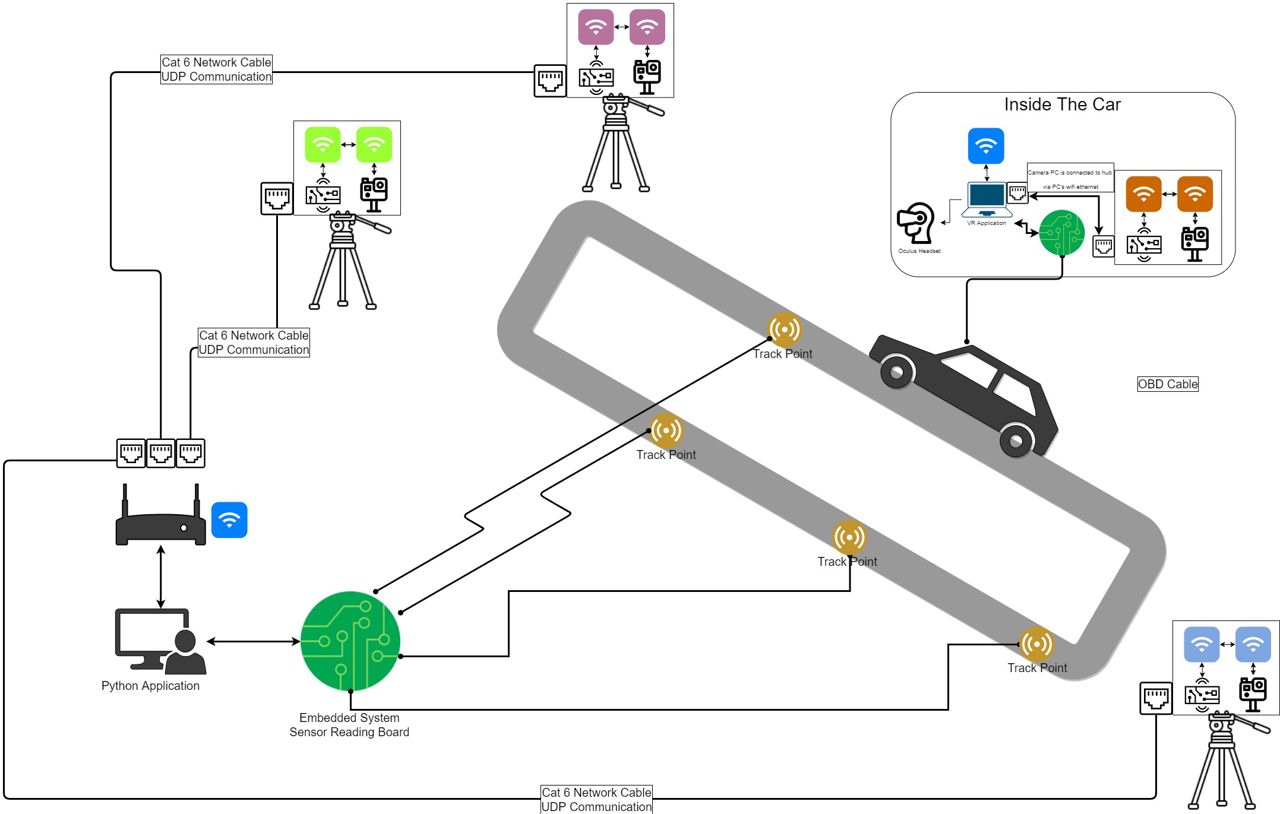
VR Mixed Reality Experience
The Dacia Duster organized a roadshow for the launching of the new Duster. They prepared the track as modular to assemble in one day in every different location. The track was designed in light of the documentation of the new Duster. Every obstacle in the area is produced consider to properties of approach angle, departure angle, break-over angle, etc. The track was long enough to show customers the off-road capabilities of the new Duster. The area planned as 1000 m2.
There were two phases of the tests. The potential customer could drive the car and experience the real obstacles in the area, then they could enter into a new world with our VR application. The VR application was produced with the Unity3D Game Engine using the C# programming language. There was a 3D designed area inside of the software and this 3D area was designed as a virtual allocation of the original track but with using different objects from different concepts. There was 3 different concept of area. The first one was in Egypt concept, the second one was inside a jungle, the last one was on an icecap.
In this experience, the test driver drives the car and the participant of this experience sits on the right seat and watches the 3D area with the same position as the real car. We make real this using several different systems.
I have designed a circuit board placed inside the car. This board was connected through the car via an OBD socket. OBD is a standard protocol for cars. The circuit board was getting the speed data. So in real-time, we knew that the car was moving or not, or which direction it moves. The circuit board was connected to the windows PC that was running the VR application inside the car and sent the processed data. Thus, the car follows the path concerning the real car.
Besides, there were tracker points on the area. This tracker points checked the position of the car from the outside and sent this signal to the VR application inside the car over a wifi connection. There was a Windows PC in the area to manage this process. There was another application working on this computer programmed with Python programming language. A distribution board is produced for this purpose. It contained another microcontroller connected to the main pc, and that microcontroller was reading the sensors from the area and send data to the main pc Python software.
Photo and Video Interaction
There was another system working independently. Four "GoPro 7 Black" cameras were placed in the area. These four different cameras were directed to the important points of the track. The sensors of the VR application were used as triggers for the cameras. The cameras recorded 10 seconds videos of the car while the participant was driving and passing through the camera's viewpoint. In real-time, the camera videos were collected to the main pc and the software programmed with python generated a video for the participant automatically. At the beginning of the video, the name of the user was written programmatically and the video was totally customized for the user.
The output video was a good memory from Dacia Duster to the user. You can watch an example output video below :
Related Posts
Check out my all posts-
August 1, 2016
Aquabooth is an underwater photo booth. The user who comes in front of the Aquabooth starts the taking photo process by ...
Category DEVICE SOLUTIONS
-
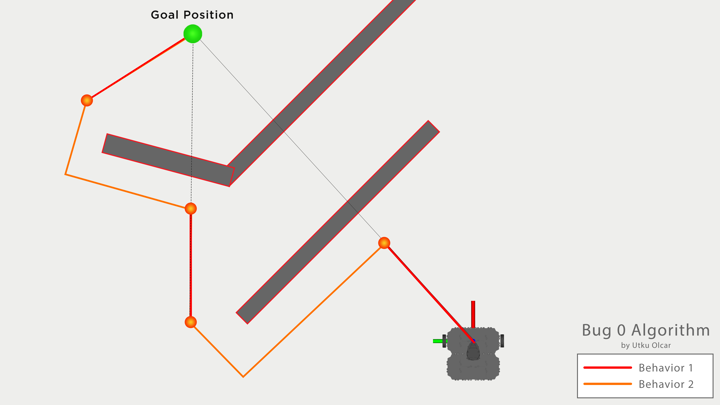
January 10, 2021
I am going to explain my work that programming the "Bug Algorithm" for the Turtlebot3 robot in the GAZEBO Simulation pla...
Category ROBOTIC PROGRAMMING
-
May 1, 2018
This photobooth device is totally mobile, working with the energy of a lipo battery. The device has its own wifi communi...
Category DEVICE SOLUTIONS


Comments
3/28/2018
utku olcar
GoPro, Networking, Python, Raspberry Pi, Video, Wifi Device Solutions, Game Programming, PCB Design, Vr Applications
0 Comments